|
I am a PhD candidate in the CSE department at UC San Diego advised by Manmohan Chandraker. I work primarily in 3D computer vision. In the past, I have twice interned at Adobe w/ Kalyan Sunkavalli, Vladimir Kim and at NVIDIA Research w/ Stan Birchfield . I have also worked as a staff researcher at UC San Diego School of Medicine with Fransisco Contijoch and was a visiting researcher in the Bio Robotics Lab with YU Haoyong at National University of Singapore. I received my M.S. degree in Computer Science from UC San Diego and B.Eng. degree in Electrical and Electronics Engineering from BITS Pilani, where I was advised by Surekha Bhanot. My research is supported by the Qualcomm Innovation Fellowship 2023. Email / Resume / Google Scholar / GitHub / LinkedIn |

|
|
|
|
I'm interested in 3D Computer Vision, particularly in inverse rendering, shape deformation, and representation learning with applications to autonomous driving, robotics, augmented reality, and medical imaging. Lately, I have been exploring the applications of LLMs in inverse rendering. Read an overview of my research here. |
|
Kunal Gupta, Miloš Hašan, Zexiang Xu, Fujun Luan, Kalyan Sunkavalli, Xin Sun, Manmohan Chandraker, Sai Bi ACM SIGGRAPH ASIA 2023 paper / project page / arXiv / code A general Monte Carlo-based method to accelerate the rendering of any NeRF representation. |
|
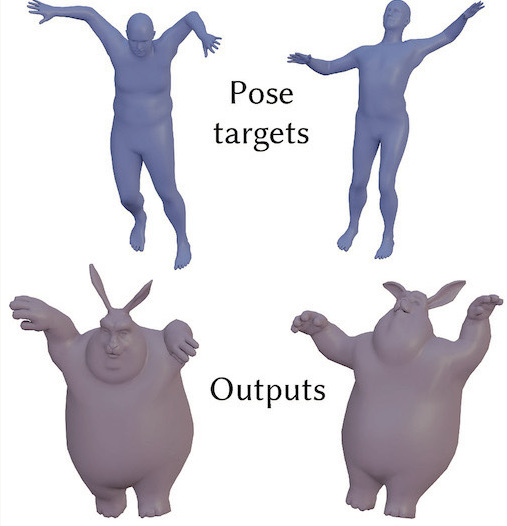
Noam Aigerman, Kunal Gupta, Vladimir Kim, Siddhartha Chaudhuri, Jun Saito, Thibault Groueix ACM SIGGRAPH 2022 (journal track) Paper / code A framework for learning to deform meshes in a highly detail-preserving manner, without being tied to a specific mesh |
|
Kunal Gupta, Brendan Colvert Zhennong Chen and Francisco Contijoch Medical Physics 2023 paper / project page / arXiv / code Motion resolved computed tomography by combining neural implicit representations and differentiable rendering |
|
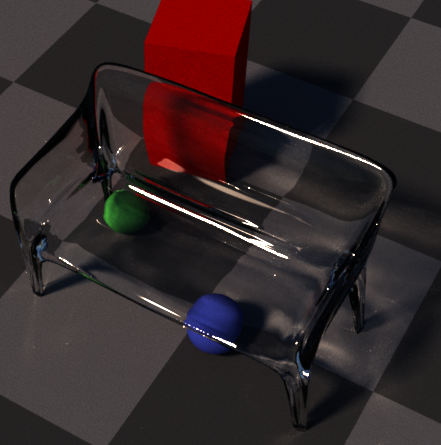
Kunal Gupta, Manmohan Chandraker NeurIPS 2020 (Spotlight) project page / arXiv / code / Master's Thesis A network that generates manifold meshes enabling photo-realistic physically based renderings and physics simulation |
|
Bachelor's Thesis Novel Stable Gait Criteria (SGC) is proposed for safe and intuitive human-robot interaction and rehabilitation. |
|
|
| Random Walks and Sampling at MC Lab Discussions, September 2020 |
| ELBO and KL-Divergence Tutorial at ERL Discussions, December 2018 |
Template stolen from Jon Barron